上QQ阅读APP看本书,新人免费读10天
设备和账号都新为新人
1.3 BEV感知算法的分类
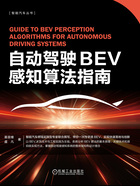
BEV感知算法的核心在于其独特的视角转换,特别是通过鸟瞰视角为自动驾驶提供直观且全面的环境表示,这使得BEV感知算法比基于其他视角算法更具优势。为了更系统地理解BEV感知算法的技术框架,笔者参考了大量相关文献,并根据视角转换模块所采用的不同技术方法,将BEV感知算法归纳为4个主要类别,分别是基于单应性的方法、基于深度估计的方法、基于多层感知器的方法以及基于Transformer的方法。通过分类,我们可以更清晰地看到BEV感知算法体系的整体架构和各个组成部分之间的关系,如图1-7所示。同时,这样的分类也有助于我们更深入地了解和研究BEV感知算法的不同实现方式及其优缺点。

图1-7 透视视角和鸟瞰视角转换的算法分类